This demo will show you how to use TPM36 sensor to get the temperature value.
- 96board
- Liner Base Mezzanine Card
- 4-pin cable
- TPM36 temperature sensor
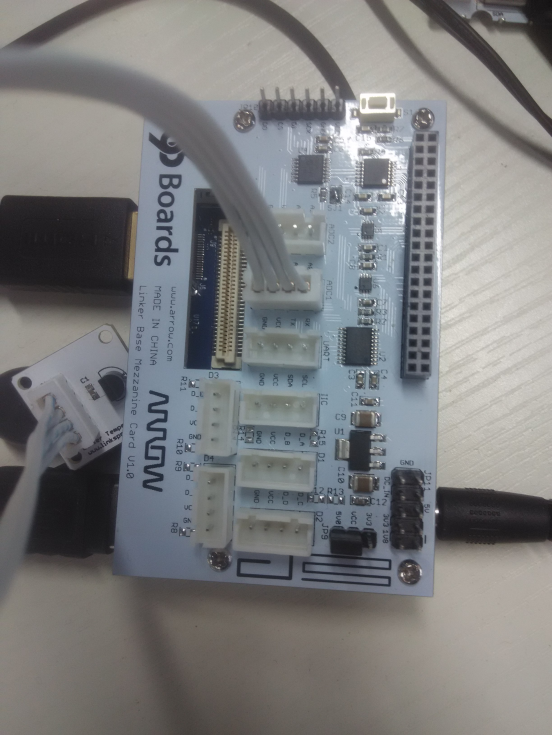
Connect
Connect TMP36 sensor to ADC1 port using 4-pin cable.
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <string.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <linux/spi/spidev.h>
#include <linux/types.h>
#include <inttypes.h>
#include "libsoc_spi.h"
#include "libsoc_gpio.h"
#include "libsoc_debug.h"
#define GPIO_CS 18
static uint8_t tx[3],rx[3];
int main()
{
int adc_value;
gpio *gpio_cs;
libsoc_set_debug(0);
gpio_cs = libsoc_gpio_request(GPIO_CS,LS_SHARED);
if(gpio_cs == NULL)
{
goto fail;
}
libsoc_gpio_set_direction(gpio_cs,OUTPUT);
if(libsoc_gpio_get_direction(gpio_cs) != OUTPUT)
{
printf("Failed to set direction to OUTPUT!\n");
goto fail;
}
spi *spi_dev = libsoc_spi_init(32766,0);
if(!spi_dev)
{
printf("Failed to get spidev device!\n");
return EXIT_FAILURE;
}
libsoc_spi_set_mode(spi_dev,MODE_0);
libsoc_spi_get_mode(spi_dev);
libsoc_spi_set_speed(spi_dev,10000);
libsoc_spi_get_speed(spi_dev);
libsoc_spi_set_bits_per_word(spi_dev,BITS_8);
libsoc_spi_get_bits_per_word(spi_dev);
tx[0] = 0x01;
tx[1] = 0x80;
tx[2] = 0x00;
while(1)
{
libsoc_gpio_set_level(gpio_cs,HIGH);
usleep(10);
libsoc_gpio_set_level(gpio_cs,LOW);
libsoc_spi_rw(spi_dev,tx,rx,3);
libsoc_gpio_set_level(gpio_cs,HIGH);
adc_value = (rx[1]<<8)&0b1100000000;
adc_value |= (rx[2]&0xff);
printf("The current temperature is %2.1f\n",(adc_value*5.0/1023-0.5)*100);
sleep(1);
}
free:
libsoc_spi_free(spi_dev);
fail:
if(gpio_cs)
{
libsoc_gpio_free(gpio_cs);
}
return EXIT_SUCCESS;
}
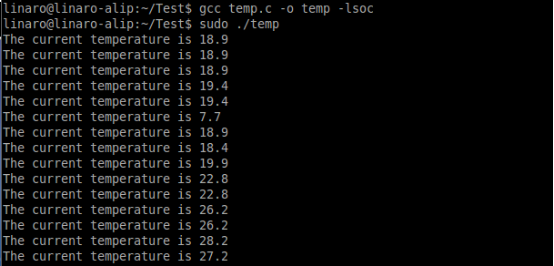
gcc temp.c -o temp -lsoc sudo ./temp
Change the temperature, the value printed on the terminal also will change.